چکیده
این مقاله در مورد چگونگی کارکرد و فناوریهای اصلی سیستمهای ماهوارهای ناوبری جهانی (GNSS) صحبت میکند. بخشهای مهم GNSS مثل ماهوارهها، تجهیزات زمینی، گیرندهها و روشهای مختلف پیدا کردن موقعیت مکانی مثل GNSS دقیق (DGPS) و موقعیتیابی آنی (RTK) توضیح داده شدهاند. همچنین در این مقاله، تأثیراتی مثل اثرات یونوسفر (بخشی از جو زمین)، مشکلات مسیرهای سیگنال برگشتی و بقیه چیزهایی که روی دقت سیگنال اثر میگذارند، توضیح داده شدهاند. در ادامه، روشهایی برای بهتر کردن دقت مثل استفاده از سیستمهای تقویت کننده ماهوارهای (SBAS) و موقعیتیابی دقیق نقطهای (PPP) و فناوریهای دیگر شرح داده شدهاند. در آخر مقاله، راهکارهای پیشرفته برای مقابله با مشکلات جعل سیگنال (spoofing)، پارازیت (jamming)، مسیرهای سیگنال برگشتی (multipath) و بقیه عواملی که دقت موقعیتیابی را کم میکنند، بررسی شدهاند.
۱. آشنایی با GNSS
سیستم ماهوارهای ناوبری جهانی (GNSS) یک سامانه است که از تعدادی ماهواره تشکیل شده و این ماهوارهها در مسیرهای مشخصی به دور زمین میچرخند. این ماهوارهها سیگنالی را میفرستند که حاوی اطلاعاتی در مورد مسیرشان و زمان دقیق (به علاوه اطلاعات دیگر) است. این سیگنال به گیرندههای مخصوصی میرسد که آن را دریافت و رمزگشایی میکنند و سپس موقعیت مکانی خود را محاسبه میکنند [۱].
برای پیدا کردن موقعیت مکانی، حداقل چهار ماهواره باید به طور مستقیم دیده شوند. سه ماهواره برای پیدا کردن مختصات (طول و عرض جغرافیایی) لازم هستند و ماهواره چهارم برای تنظیم و دقیق کردن زمان ساعت گیرنده استفاده میشود. این روش پیدا کردن موقعیت مکانی را تثلیث مینامند [۲] که در ادامه با جزئیات بیشتری توضیح داده خواهد شد.
خیلی وقتها، به جای عبارت GNSS، از GPS استفاده میشود. اما این فقط تا حدی درست است، چون GPS تنها یکی از مجموعههای ماهوارهای است که توسط ایالات متحده راهاندازی شده است.
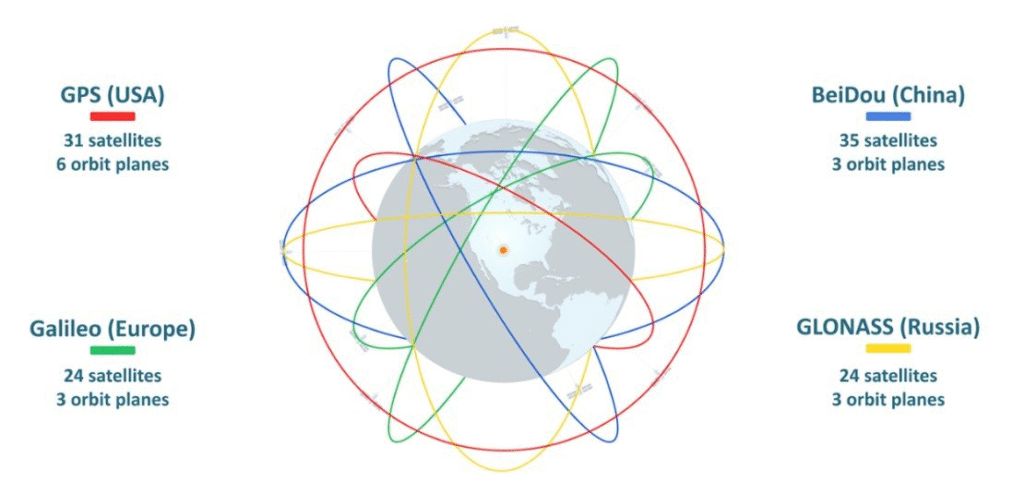
تا سال ۲۰۲۴، مجموعههای ماهوارهای زیر فعال هستند: GPS (سیستم موقعیتیابی جهانی آمریکا)، GLONASS (سیستم ناوبری ماهوارهای روسیه)، BDS (سیستم ناوبری ماهوارهای BeiDou چین) و Galileo (سیستم ماهوارهای اتحادیه اروپا).
علاوه بر چهار سیستم جهانی، سیستمهای منطقهای نیز وجود دارند: QZSS (یک سیستم ماهوارهای شبهسمتالرأس منطقهای ژاپنی) و NavIC (یک سیستم مستقل برای منطقه هند) [۳]. سیستمهای ماهوارهای منطقهای برای ارتباطات، ناوبری، نظارت و پایش در یک منطقه خاص استفاده میشوند.
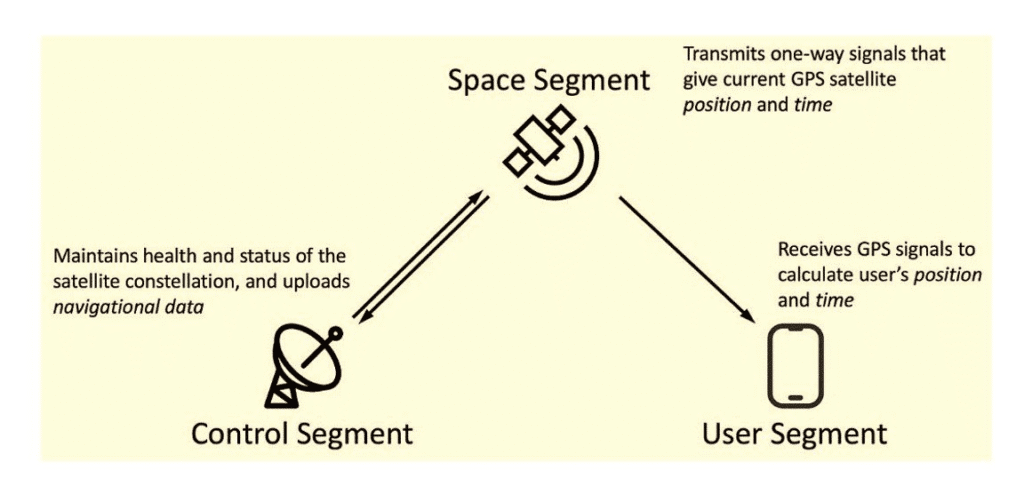
GNSS از سه بخش اصلی تشکیل شده است:
- بخش فضایی: ماهوارههای GNSS سیگنالهایی را از فضا پخش میکنند، و تمام گیرندههای GNSS از این سیگنالها برای محاسبه موقعیت خود در فضا با استفاده از سه مختصات در زمان واقعی استفاده میکنند.
- بخش کنترل: بخش کنترل شامل ایستگاههای زمینی است. این ایستگاهها به اصلاح دادههای ماهوارهای کمک میکنند، خطاهای جوی و سایر خطاها را در نظر میگیرند و دقت ناوبری را بهبود میبخشند. ایستگاهها وضعیت ماهوارهها و مدارهایشان را نظارت کرده و بهروزرسانیهایی درباره وضعیت GPS ارائه میدهند. آنها همچنین میتوانند تصحیحاتی را برای خطاهای محلی ارسال کنند، که به کاربران (مانند کشاورزان یا نقشهبرداران) اجازه میدهد مختصات دقیقتری به دست آورند. آنها دادههایی را برای تحقیق در زمینههای ژئودزی (علم اندازهگیری زمین)، ژئوفیزیک و سایر علوم جمعآوری میکنند که به شما امکان میدهد تغییرات سطح زمین را ردیابی کرده و مطالعات دیگری انجام دهید.
- بخش کاربر: بخش کاربر شامل میلیونها گیرنده GPS است که متعلق به کاربران عادی هستند.
اکنون، به یک پیشینه تاریخی مختصر از مراحل اصلی پیدایش و توسعه GNSS میپردازیم.
مراحل کلیدی و نقاط عطف در توسعه GNSS
ایالات متحده آمریکا و اتحاد جماهیر شوروی در اواخر دهه ۱۹۵۰ اولین گامها را به سمت ایجاد سیستمهای ناوبری ماهوارهای برداشتند. در سال ۱۹۵۷، اتحاد جماهیر شوروی ماهواره «اسپوتنیک ۱» را پرتاب کرد و دانشمندان آمریکایی کشف کردند که میتوانند سیگنال آن را برای تعیین موقعیت یک ناظر روی زمین ردیابی کنند. این اصل، اساس سیستمهای ناوبری آینده شد. در دهه ۱۹۶۰، ایالات متحده سیستم ترانزیت (Transit) را ایجاد کرد که برای اهداف نظامی، بهویژه ناوبری زیردریایی، طراحی شده بود. ترانزیت از ماهوارههایی در مدارهای پایین استفاده میکرد اما دقت محدودی داشت و زمان بهروزرسانی دادهها کند بود.
در دهه ۱۹۷۰، ایالات متحده شروع به توسعه یک سیستم ماهوارهای جدید کرد تا پوشش ناوبری دقیقتر و قابلاعتمادتری ارائه دهد. این سیستم GPS (Global Positioning System) نامیده شد. اولین ماهواره GPS در سال ۱۹۷۸ به عنوان بخشی از برنامه NAVSTAR پرتاب شد. همزمان، اتحاد جماهیر شوروی نیز شروع به توسعه سیستم ناوبری ماهوارهای جهانی خود، GLONASS (Global Navigation Satellite System) کرد. اولین ماهواره GLONASS در سال ۱۹۸۲ پرتاب شد و این برنامه تا زمان فروپاشی اتحاد جماهیر شوروی به توسعه خود ادامه داد.
در اوایل دهه ۱۹۹۰، GPS شروع به استفاده توسط کاربران نظامی و غیرنظامی کرد. این سیستم به تدریج مستقر شد و تا سال ۱۹۹۳، با ۲۴ ماهواره به سطح عملیاتی رسید و پوشش جهانی را فراهم کرد. در سال ۱۹۹۵، GPS رسماً به طور کامل عملیاتی اعلام شد. این سیستم به دلیل کاربردهای ناوبری، نقشهبرداری، هوانوردی، دریانوردی و سایر مقاصد، در میان کاربران غیرنظامی محبوب شد.
با توسعه فناوری و افزایش نیاز به ناوبری دقیق، کشورهای دیگر و سازمانهای بینالمللی نیز شروع به توسعه GNSS خود کردند. در سال ۲۰۰۳، توسعه گالیله (Galileo)، سیستم ناوبری ماهوارهای اروپا، آغاز شد. اولین ماهوارهها در سال ۲۰۱۱ پرتاب شدند و این سیستم رسماً در حالت محدود در سال ۲۰۱۶ عملیاتی شد. گالیله برای ارائه دادههای دقیقتر و استقلال از GPS و GLONASS طراحی شده است. چین نیز سیستم ناوبری خود را توسعه داده است [۵]. در دهه ۲۰۰۰، کار بر روی سیستم بیدو (BeiDou) آغاز شد و تا سال ۲۰۲۰، به پوشش جهانی دست یافت و به یک جایگزین کامل برای سایر GNSS ها تبدیل شد.
علاوه بر این، GPS و GLONASS چندین مرحله نوسازی را برای بهبود دقت و قابلیت اطمینان پشت سر گذاشتهاند. در سال ۲۰۰۰، ایالات متحده قابلیت “در دسترس بودن انتخابی (Selective Availability)” را که عمداً دقت سیگنال GPS غیرنظامی را کاهش میداد، غیرفعال کرد. این اقدام به طور قابل توجهی دقت را برای کاربران غیرنظامی بهبود بخشید. سیستم GLONASS نیز در روسیه تا سال ۲۰۱۰ نوسازی و بازسازی شد و پوشش کامل جهانی را فراهم کرد.
همانطور که مشاهده میشود، توسعه ناوبری ماهوارهای راه طولانی را از زمان آغاز تا به امروز پیموده است. سهولت استفاده و در دسترس بودن جهانی، GNSS را به یک دستیار ضروری در بسیاری از زمینهها تبدیل کرده است که در ادامه به طور خلاصه توضیح داده خواهد شد.
کاربردهای GNSS
GNSS به دلیل توانایی خود در تعیین موقعیت دقیق اجسام، نقش مهمی در دنیای امروز ایفا میکند [۶]. در اینجا چند کاربرد اصلی آن آورده شده است:
- حملونقل و لجستیک: GNSS به ناوبری و برنامهریزی مسیر برای انواع حملونقل: زمینی، هوایی و دریایی کمک میکند.
- کشاورزی (کشاورزی دقیق): GNSS ماشینآلات کشاورزی را خودکار میکند و امکان کاشت، کوددهی و برداشت دقیق را فراهم میسازد. این کار بهرهوری را افزایش داده و هزینهها را کاهش میدهد. همچنین دادههایی در مورد وضعیت مزارع و گیاهان جمعآوری میکند که به بهینهسازی مدیریت منابعی مانند آب و کود امکانپذیر میسازد.
- ژئودزی و نقشهبرداری: GNSS به طور گسترده در ژئودزی برای تعیین دقیق مختصات، ایجاد نقشهها و نظارت بر حرکات پوسته زمین و تغییرات مناظر طبیعی استفاده میشود. فناوریهای مدرن امکان دستیابی به دقت اندازهگیری در حد سانتیمتر را فراهم میکنند.
- ساختوساز و مهندسی: GNSS برای ساخت ساختمانها، جادهها، پلها و سایر زیرساختها به منظور موقعیتیابی دقیق و کنترل کار استفاده میشود.
- ایمنی مدنی و خدمات اضطراری: GNSS در عملیات جستجو و نجات برای تعیین موقعیت دقیق افراد در معرض خطر، به ویژه در مناطق دورافتاده و صعبالعبور، استفاده میشود. همچنین برای ردیابی و هماهنگی خدمات اضطراری مانند پلیس، آمبولانس و آتشنشانی کاربرد دارد.
- مخابرات و همگامسازی زمانی: GNSS در ارائه همگامسازی زمانی دقیق، که برای شبکههای مخابراتی و تراکنشهای مالی ضروری است، اهمیت اساسی دارد.
- کاربردهای نظامی: GNSS برای ناوبری و کنترل تجهیزات نظامی مانند هواپیماها، تانکها و کشتیها، و همچنین سیستمهای موشکی و پهپادی برای هدایت دقیق استفاده میشود.
بنابراین، در دنیای مدرن، ناوبری ماهوارهای به بخشی جداییناپذیر از زندگی ما تبدیل شده است. بخش بعدی به بررسی چگونگی کارکرد GNSS و عواملی که بر دقت سیستم تأثیر میگذارند، خواهد پرداخت.
۲. اصول GNSS
مدارهای ماهوارهای و موقعیت آنها
ماهوارههای GNSS در ارتفاعات متوسط مدار زمین قرار دارند که پوشش و دقت بهینه را برای ناوبری جهانی فراهم میکنند. بسته به سیستم، مدارها ممکن است کمی متفاوت باشند، اما به طور کلی، آنها حدود ۲۰۰۰۰ کیلومتر بالاتر از سطح زمین قرار دارند.
در ادامه پارامترهای اصلی مداری برای هر سیستم آورده شده است:
- GPS
- مدار: مدار میانی زمین (MEO – Medium Earth Orbit).
- ارتفاع: حدود ۲۰۲۰۰ کیلومتر.
- تعداد ماهوارهها: ۳۱ (با ماهوارههای رزرو).
- صفحات مداری: ۶ صفحه، با شیب حدود ۵۵ درجه نسبت به استوا.
- زمان چرخش ماهواره حدود ۱۲ ساعت است.
- GLONASS
- مدار: مدار میانی زمین (MEO – Medium Earth Orbit).
- ارتفاع: حدود ۱۹۱۰۰ کیلومتر.
- تعداد ماهوارهها: ۲۴ (۸ ماهواره در سه صفحه مداری).
- صفحات مداری: ۳ صفحه، با شیب حدود ۶۴.۸ درجه نسبت به استوا، که مزیتی در عرضهای جغرافیایی شمالی ایجاد میکند.
- زمان چرخش ماهواره حدود ۱۱ ساعت و ۱۵ دقیقه است.
- Galileo
- مدار: مدار میانی زمین (MEO – Medium Earth Orbit).
- ارتفاع: حدود ۲۳۲۲۲ کیلومتر.
- تعداد ماهوارهها: ۳۰ (شامل ماهوارههای یدکی).
- صفحات مداری: ۳ صفحه، با شیب ۵۶ درجه نسبت به استوا.
- زمان یک گردش کامل ماهواره حدود ۱۴ ساعت است.
- BeiDou (از ترکیبی از مدارها استفاده میکند)
- MEO (مدار میانی زمین): ماهوارهها حدود ۲۱۱۵۰ کیلومتر ارتفاع دارند، با شیب حدود ۵۵ درجه.
- GEO (مدار زمینایستا – Geostationary Orbit): برخی ماهوارهها در ارتفاع ۳۵۷۸۶ کیلومتری قرار دارند و نسبت به زمین ثابت میمانند.
- IGSO (مدار مایل زمینآهنگ – Inclined Geosynchronous Orbit): در ارتفاع حدود ۳۵۷۸۶ کیلومتری، اما با شیب ۵۵ درجه برای بهبود پوشش در عرضهای جغرافیایی بالا.
- تعداد ماهوارهها: ۴۴.
- در نتیجه، این ساختار ترکیبی پوشش جهانی و ناوبری دقیقتر را در منطقه آسیا و اقیانوسیه فراهم میکند.
اکنون، بیایید به اصول کارکرد فناوری GNSS نگاهی بیندازیم و بفهمیم چرا برای تعیین موقعیت به چهار ماهواره نیاز است.
انتقال سیگنال و محاسبه فاصله
اصل ناوبری ماهوارهای بر پایه اندازهگیری زمان انتقال سیگنال از ماهواره به گیرنده است . زمان (ts) در سرعت نور ضرب میشود و بدین ترتیب فاصله تعیین میگردد. با نادیده گرفتن خطاها، برد واقعی از ماهواره تا گیرنده به صورت زیر تعریف میشود:
که در آن (Ts) زمان ثبت شده در برچسب اطلاعات موقعیت ماهوارهای است که توسط گیرنده دریافت شده است؛ (tu) زمان ساعت گیرنده هنگام دریافت دادههای ماهوارهای است.
با اندازهگیری برد  از تعداد i ماهواره ، موقعیت گیرنده را میتوان به صورت زیر محاسبه کرد:
از تعداد i ماهواره ، موقعیت گیرنده را میتوان به صورت زیر محاسبه کرد:
که در آن  موقعیت ماهواره i-ام در سیستم مختصات ECEF در زمان ارسال است که از افمریس (ephemeris) مشخص است؛ (
موقعیت ماهواره i-ام در سیستم مختصات ECEF در زمان ارسال است که از افمریس (ephemeris) مشخص است؛ ( ) موقعیت گیرنده در سیستم مختصات ECEF است که باید تعیین شود.
) موقعیت گیرنده در سیستم مختصات ECEF است که باید تعیین شود.
معادله (۲) موقعیت کاربر را از طریق چهار کره توصیف میکند. برد مشاهده شده شعاع هر یک از آنها را میدهد و مرکز آن با ماهوارهها مطابقت دارد. این کرهها در نقطه موقعیت گیرنده با یکدیگر تقاطع پیدا میکنند، همانطور که در شکل زیر نشان داده شده است.

تقاطع چهار کره
برد واقعی (True range) نیز برد هندسی (geometric range) نامیده میشود. حال، بیایید بحث کنیم که چرا دقیقاً به چهار ماهواره برای تعیین موقعیت نیاز است. فاصله تا یک ماهواره مشخص میکند که جسم در جایی روی سطح یک کره اطراف آن ماهواره قرار دارد [۸]. ماهواره دوم، موقعیت احتمالی را به یک دایره (محل تقاطع دو کره) محدود میکند. ماهواره سوم، آن را به دو نقطه احتمالی (محل تقاطع سه کره) محدود میکند که یکی از آنها معمولاً در فضا است و حذف میشود، همانطور که در شکل ۴ نشان داده شده است. بنابراین، سه ماهواره میتوانند عرض جغرافیایی، طول جغرافیایی و ارتفاع را تعیین کنند، که برای اطمینان کامل کافی نیست.
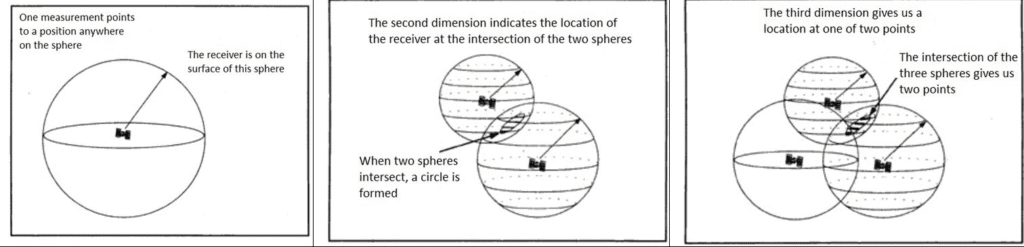
تفاوت بین یک، دو و سه مشاهده (ماهواره) در GNSS
دستگاههای گیرنده ساعتهای اتمی موجود در ماهوارهها را ندارند، بنابراین دقت زمانسنجی آنها میتواند بهتر باشد. حتی یک خطای کوچک در اندازهگیری زمان منجر به خطاهای قابل توجهی در محاسبه فاصله تا ماهوارهها و در نتیجه، تعیین مختصات میشود. ماهواره چهارم برای تصحیح زمان مورد نیاز است. این ماهواره به گیرنده اجازه میدهد تا به طور همزمان معادلات مربوط به سه مختصات فضایی و زمان را حل کند، که منجر به موقعیتیابی دقیق و همگامسازی زمانی میشود (شکل زیر). علاوه بر این، موقعیت گیرنده به طور منحصر به فرد با استفاده از بعد چهارم (زمان) تعیین میگردد.
تعیین منحصر به فرد موقعیت با استفاده از چهار ماهواره
همانطور که پیشتر توضیح داده شد، با سه ماهواره میتوانیم موقعیت شما را به دو نقطه احتمالی محدود کنیم (تصور کنید سه کره در فضا همدیگر را قطع میکنند). یکی از این نقاط معمولاً جایی دور از زمین یا در فضایی نامعقول است که به راحتی توسط گیرنده نادیده گرفته میشود و نقطه دیگر همان موقعیت واقعی شما روی زمین است. پس چرا به ماهواره چهارم نیاز داریم؟
دلیل اصلی نیاز به ماهواره چهارم به دقت زمانسنجی برمیگردد. ساعتهای موجود در ماهوارههای GNSS از نوع اتمی هستند و فوقالعاده دقیق عمل میکنند. اما ساعتهای داخل گیرندههای ما (مانند گوشیهای هوشمند یا دستگاههای GPS) به این دقت نیستند و ممکن است کمی جلو یا عقب باشند.
حتی یک خطای بسیار کوچک در زمانسنجی گیرنده میتواند منجر به خطاهای بسیار بزرگی در محاسبه فاصله تا ماهوارهها شود. این به این دلیل است که سیگنالهای ماهوارهای با سرعت نور حرکت میکنند؛ بنابراین، اگر ساعت گیرنده شما حتی کسری از ثانیه هم خطا داشته باشد، این خطا در مسافتهای طولانی (دهها هزار کیلومتر تا ماهواره) به چندین متر یا حتی صدها متر خطا در محاسبه فاصله تبدیل میشود.
ماهواره چهارم نقش کلیدی در حل این مشکل ایفا میکند:
- تصحیح خطای ساعت گیرنده: با استفاده از سیگنال چهارمین ماهواره، گیرنده میتواند یک معادله اضافی برای حل داشته باشد. این معادله اضافی به گیرنده اجازه میدهد تا همزمان هم سه مختصات فضایی (طول، عرض و ارتفاع) خود را محاسبه کند و هم خطای ساعت داخلی خود را تصحیح کند.
- تعیین منحصر به فرد موقعیت: در واقع، با چهار ماهواره، گیرنده سیستمی از چهار معادله را برای چهار مجهول حل میکند: سه مجهول برای موقعیت مکانی (x,y,z) و یک مجهول برای خطای ساعت گیرنده (Δt). این کار تضمین میکند که یک راهحل منحصر به فرد و بسیار دقیق برای موقعیت شما به دست میآید.
به عبارت ساده، ماهواره چهارم به گیرنده کمک میکند تا “ساعت خود را تنظیم کند” و این تنظیم دقیق ساعت، منجر به محاسبه بسیار دقیقتر فواصل تا ماهوارهها و در نهایت، یک تعیین موقعیت بیابهام و قابل اعتماد میشود.
اندازهگیری سرعت برد داپلر  (Doppler range velocity) نیز به همین روش برای تعیین سرعت گیرنده (۳) توصیف میشود.
(Doppler range velocity) نیز به همین روش برای تعیین سرعت گیرنده (۳) توصیف میشود.

که در آن \(dot{\rho _{r}}\) نرخ تغییر برد (range rate) است؛ vsat سرعت ماهواره است؛ vrec سرعت مطلوب گیرنده است، و rrec موقعیت گیرنده است که از (۲) به دست آمده است.
موقعیت گیرنده در سیستم مختصات ECEF (Earth-Centered, Earth-Fixed) تعریف میشود، اما برای استفاده عملی، گیرنده معمولاً مختصات را به سیستم مختصات جغرافیایی (geographic coordinate system) تبدیل میکند.
ساعت اتمی و بردهای کاذب
همانطور که قبلاً ذکر شد، ماهوارهها دارای ساعت اتمی (atomic clock) هستند. وظیفه آنها تعیین دقیق زمان است، با خطایی که در حد نانوثانیه اندازهگیری میشود. این دقت بسیار حیاتی است، زیرا گیرندههای GNSS موقعیت خود را با اندازهگیری زمانی که طول میکشد تا سیگنال از ماهواره به گیرنده برسد، محاسبه میکنند [۱۰، ۱۱]. از آنجایی که سیگنال با سرعت نور (تقریباً ۳۰۰۰۰۰ کیلومتر بر ثانیه) حرکت میکند، حتی یک خطای کوچک در اندازهگیری زمان (به عنوان مثال، یک میلیثانیه) میتواند منجر به خطای قابل توجهی در تعیین موقعیت (تا ۳۰۰ متر) شود. این موضوع به راحتی از فرمول (۱) قابل تعیین است. فرض کنید Rpseudo یک برد هندسی (geometric range) باشد که با خطای ناشی از عدم دقت ساعت c⋅dtrec همراه است؛ پس از جایگزینی اعداد، خواهیم داشت:

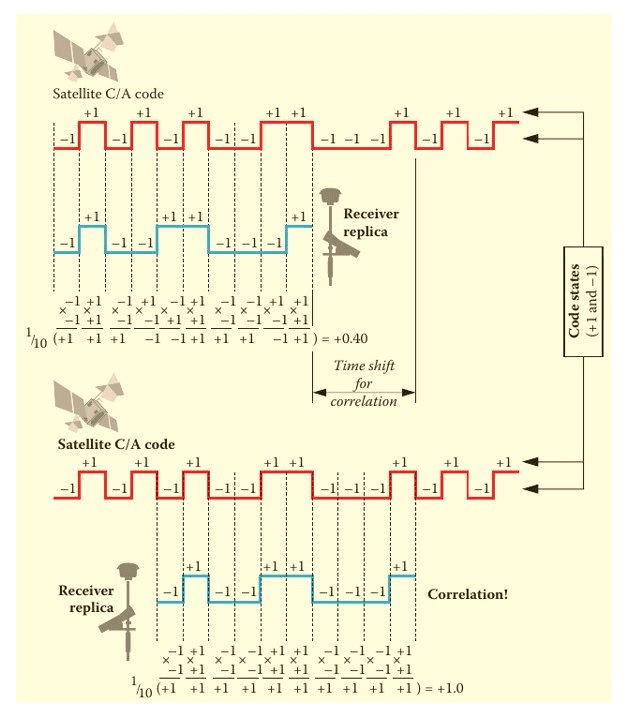
گیرنده GNSS برای تعیین زمان تأخیر سیگنال و محاسبه فاصله تا ماهواره، همان کدی را که ماهواره تولید میکند، تولید میکند. این فرایند همبستگی کد شبهتصادفی (pseudorandom code correlation) نامیده میشود. هر ماهواره GNSS یک کد شبهتصادفی (pseudorandom code) منحصر به فرد را ارسال میکند که در فواصل زمانی کوتاه (به عنوان مثال، هر میلیثانیه برای GPS) تکرار میشود. گیرنده نسخههایی از این کدها را برای هر ماهواره در اختیار دارد و آنها را با سیگنالهای دریافتی از ماهوارهها همگامسازی میکند. هنگامی که گیرنده سیگنالی را از ماهواره دریافت میکند، کد تولیدی خود را با سیگنال دریافتی مطابقت میدهد (شکل ۶).

شکل ۶. فرآیندهای همبستگی
فرایند همبستگی (correlation process) (همترازی) به ما امکان میدهد تا اختلاف زمانی بین ارسال کد توسط ماهواره و دریافت این سیگنال توسط دستگاه را تعیین کنیم. این اختلاف زمان، ضرب در سرعت نور، فاصله تا ماهواره را به دست میدهد. با دانستن زمان دقیق ارسال سیگنال توسط ماهواره و محاسبه تأخیر بر اساس همبستگی کدها، گیرنده فاصله خود را از ماهواره تعیین میکند.
با این حال، تغییر زمانی که با استفاده از همبستگی به دست میآید، خطایی دارد که ناشی از عدم همگامسازی کامل بین ساعتهای ماهواره و گیرنده است. گیرندهها از سیگنالهای ماهوارهای برای کالیبره کردن ساعت داخلی خود استفاده میکنند که این کار به آنها اجازه میدهد خطاهای اندازهگیری زمان را از بین ببرند. با این حال، این حذف فقط جزئی است؛ زیرا پس از کالیبره کردن زمان، ساعت گیرنده کمی “دریفت” (drift) پیدا میکند که منجر به خطا میشود. این خطاها ناشی از نواقص در نوسانسازهای (oscillators) گیرنده هستند. بر این اساس، کدهای تولید شده نیز نمیتوانند به طور کامل همگامسازی شوند. به عبارت دیگر، تغییر زمان شامل زمان سیگنال از ماهواره به گیرنده و خطاهای ساعت است.
افست ساعت (clock offset) خطایی را در اندازهگیری برد ایجاد میکند، و این اندازهگیریهای برد مشاهده شده شبهبرد (pseudoranges) نامیده میشوند (۴) [۸].

که در آن Rpseudoi شبهبرد (pseudo-range) اندازهگیری شده تا ماهواره i-ام است؛ c⋅dtrec خطای ناشی از افست ساعت (clock offset) گیرنده نسبت به ساعت ماهواره i-ام است.
افست ساعت به عنوان یک متغیر ناشناخته در نظر گرفته میشود تا خطای قابل توجه ناشی از عدم تطابق زمانی بین گیرنده و ماهوارهها جبران شود. این مقدار به طور همزمان با موقعیت سهبعدی، بر اساس **شبهبردها (pseudoranges)**ی که از چهار ماهواره به دست میآید، محاسبه میشود. از آنجایی که تصحیح زمان در هر بهروزرسانی اندازهگیری انجام میشود، نیازی به استفاده از ساعتهای بسیار پایدار و گرانقیمت در گیرندهها نیست.
علاوه بر خطای ساعت، سیگنال در هنگام عبور از جو تحت تأثیر منابع خطای دیگری نیز قرار میگیرد، مانند دریفت موقعیت ماهواره در مدار (drift of the satellite’s position in orbit)، یونوسفر (ionosphere) و تروپوسفر (troposphere)، و تأثیر شرایطی که گیرنده در آن قرار دارد (شکل ۷).

شکل ۷. منابع خطاهای سیگنال
با در نظر گرفتن این خطاها، عبارت مربوط به شبهبرد (pseudo-range) به شکل (۵) درخواهد آمد:

که در آن:
- dorbit خطای موقعیت ماهواره در مدار است؛
- diono خطای یونوسفری است؛
- dtropo خطای تروپوسفری است؛
- dnoise نویز (noise) گیرنده است؛
- dmulti خطای چندمسیره (multipath error) است.
تأثیر عوامل بر دقت تعیین موقعیت در جدول ۱ آورده شده است.
| نوع خطا | برد (متر) | توضیحات |
| مداری | ±۲.۵ | انحرافات جزئی در موقعیت ماهواره در مدار منجر به خطاهای بزرگی در تعیین موقعیت گیرنده روی زمین میشود. |
| یونوسفری | ±۵ | لایه بالایی جو به دلیل یونیزاسیون ناشی از تابش خورشیدی، حاوی الکترونهای زیادی است. این لایه میتواند سرعت سیگنال را کاهش داده و آن را بازتاب دهد. |
| تروپوسفری | ±۰.۵ | لایههای پایینی جو میتوانند سیگنال را به دلیل رطوبت و چگالی آن، دچار شکست (انکسار) کنند. |
| زمانبندی | ±۲ | دریفت (Drift) در ساعت گیرنده منجر به خطاهای تعیین موقعیت میشود. |
| چندمسیره | ±۱ | سیگنال از ساختمانها یا اشیاء دیگر بازتاب مییابد و دیرتر از سیگنال بدون بازتاب به گیرنده میرسد. این امر منجر به خطا در اندازهگیری فاصله میشود. |
| نویز گیرنده | ±۰.۳ | راهحلهای نرمافزاری و سختافزاری در گیرنده ایدهآل نیستند، که به همین دلیل نویز ایجاد میشود و مؤلفههای خود را به سیگنال اضافه میکند. |
در این مقاله، به جنبه مهمی مانند ساختار سیگنال (signal structure) نپرداختهایم، اما خوانندگان علاقهمند میتوانند این اطلاعات را در لینکهای [۱۲، ۱۳] بیابند.
پس از اینکه با منابع خطاها و شبهبردها (pseudoranges) آشنا شدیم، به بررسی فناوریها و روشهای افزایش دقت موقعیتیابی GNSS خواهیم پرداخت.
۳. بهبود دقت GNSS
صحت (Accuracy) و دقت (Precision)
قبل از بررسی روشها و فناوریهای افزایش صحت موقعیتیابی GNSS، بیایید با جزئیات بیشتری به مفهوم صحت و دقت بپردازیم [۱۴]. برای درک تفاوت بین صحت و دقت، شکل ۸ را در نظر بگیرید.
- در حالت اول (۱)، نقاط در سراسر هدف پراکنده شدهاند؛ یعنی، میزان نزدیکی مقدار اندازهگیری شده به مقدار واقعی بسیار دور است و اندازهگیریها تکرارپذیری (repeatability) ندارند.
- در حالت دوم (۲)، تکرارپذیری عالی مشاهده میشود، اما نقاط از مرکز هدف، یعنی از مقدار واقعی، دور هستند.
- در حالت سوم (۳)، نقاط به مرکز نزدیک هستند، اما هیچ خوشهبندی (clustering) یا تکرارپذیری وجود ندارد.
- بالاخره، در حالت چهارم (۴)، همه نقاط در مرکز هدف قرار دارند، با صحت و دقت خوب.

شکل ۸. تفاوت بین دقت و صحت.
این مثال ساده تفاوت بین صحت و دقت را روی اهداف نشان میدهد، اما تصویر کلی همین است. به عبارت دیگر، این را میتوان به عنوان خطاهای مطلق (absolute errors) و خطاهای نسبی (relative errors) توصیف کرد.
- در حالت ۳، خطای مطلق حداقل است، اما خطای نسبی بالا است.
- در حالی که در حالت ۲، وضعیت برعکس است.
در حالت ایدهآل، یک گیرنده GNSS باید هم دقت و هم صحت را ارائه دهد، اما به دلیل عوامل و محدودیتهای ذکر شده، همیشه اینطور نیست. در ادامه، عوامل اضافی و منابع خطاهایی که بر دقت تعیین موقعیت تأثیر میگذارند را بررسی خواهیم کرد.
محدودیتها و منابع خطاهای سیگنال GNSS
محدودیتهای طبیعی شامل عدم وجود سیگنال در داخل ساختمانها، در تونلها، زیر زمین، و همچنین چندمسیره (multipath) هستند.
در شرایط ایدهآل، سیگنال از ماهواره مستقیماً و بدون هیچ مانعی به گیرنده میرسد. اما در شرایط طبیعی، سیگنال اغلب با سطوحی مانند ساختمانها، درختان، آب، یا سایر اشیاء برخورد میکند و از آنها بازتاب مییابد. در نتیجه، گیرنده میتواند هم سیگنال مستقیم و هم یک یا چند سیگنال بازتاب شده را دریافت کند، همانطور که در شکل ۹ [۱۵] نشان داده شده است.

شکل ۹. چندمسیره.
از آنجایی که سیگنال بازتابیافته مسیر طولانیتری را طی میکند، با تأخیر نسبت به سیگنال مستقیم میرسد. این میتواند گیرنده را گمراه کرده و منجر به خطا در تعیین فاصله و موقعیت شود.
علاوه بر عوامل بررسیشده، که عمدتاً منشأ طبیعی دارند، عوامل دیگری نیز وجود دارند که توسط ابزارهای مصنوعی ایجاد میشوند.
پارازیت (Jamming). مهاجم از سیگنالهای رادیویی قوی در همان فرکانسهای سیگنالهای GNSS استفاده میکند و تداخل ایجاد کرده و مانع از دریافت دادهها از ماهوارهها توسط گیرنده میشود (شکل ۱۰) [۱۶]. برخلاف اخلالگری (spoofing)، پارازیت سعی در تغییر موقعیت یا زمان ندارد؛ بلکه صرفاً مانع از دریافت سیگنالها و در نتیجه، تعیین مختصات توسط گیرنده میشود. این میتواند منجر به از کار افتادن کامل سیستم ناوبری شود.

شکل ۱۰. پارازیت.
اخلالگری سیگنال (Signal spoofing). این روش گیرنده GNSS را با ارسال سیگنالهای جعلی که سیگنالهای ماهوارهای واقعی را تقلید میکنند، فریب میدهد [۱۶]. مهاجم سیگنالهایی را ارسال میکند که ماهوارههای واقعی را شبیهسازی میکنند، اما با پارامترهای تغییر یافته، مانند زمان یا مختصات. با دریافت چنین سیگنالی، گیرنده ممکن است به اشتباه مکان یا زمان خود را تعیین کند که منجر به دادههای تحریف شده یا نادرست میشود. به عنوان مثال، مهاجم میتواند گیرنده را به جای اشتباهی هدایت کند تا یک کشتی یا وسیله نقلیه را از مسیر خود منحرف کند (شکل ۱۱).

شکل ۱۱. اخلالگری
روشهایی برای بهبود دقت موقعیتیابی GNSS
دقت گیرندههای استاندارد GNSS بدون تصحیح و بهبودهای اضافی، در صفحه افقی ۵ تا ۱۰ متر است. برای به حداقل رساندن خطاها و بهبود دادههای موقعیت مکانی به منظور افزایش دقت موقعیتیابی GNSS، از روشها و فناوریهای مختلفی استفاده میشود. محبوبترین آنها در زیر لیست شدهاند:
تمام روشهای تصحیح عموماً بر پایه GPS تفاضلی (DGPS – Differential GPS) هستند (شکل ۱۲). موقعیتیابی تکنقطهای (Single-point positioning) از یک گیرنده استفاده میکند. اما GPS تفاضلی حداقل از دو گیرنده استفاده میکند [۱۷]. یکی از گیرندهها (گیرنده پایه یا Base) ثابت است و در یک مکان شناخته شده قرار دارد.

Figure 12. DGPS Principles.
هر دو گیرنده سیگنالها را از مجموعههای ماهوارهای یکسان، در یک زمان دریافت میکنند. فاصله بین گیرنده پایه (base) و گیرنده متحرک (rover) (که خط پایه (baseline) نامیده میشود) بسیار کوتاهتر از فاصله از گیرنده تا ماهواره (۲۰۰۰۰ کیلومتر) است. این امر یک همبستگی بین گیرنده پایه و گیرنده متحرک ایجاد میکند، به طوری که هر دو گیرنده خطاهای مشابهی را ثبت میکنند. و از آنجایی که موقعیت گیرنده پایه مشخص است، میتوان تصحیحاتی را تولید کرد که برای بهبود دقت موقعیت گیرنده متحرک استفاده میشوند. این روش به ویژه در فواصل کوتاه از ایستگاه پایه مؤثر است.
بیایید به شکل ۶ بازگردیم، که اصل همبستگی را نشان میدهد. اندازهگیریها با استفاده از یک سیگنال دیجیتال میتوانند به اندازه زمانبندی ماهواره و گیرنده دقیق باشند. از آنجایی که سیگنال تکرار نمیشود، به سادگی با دانستن اینکه سرعت نور چقدر دادهها را جابجا میکند، میتوان فاصله ماهواره را تعیین کرد. تفاوت اصلی بین DGPS و RTK که در ادامه به آن خواهیم پرداخت، این است که DGPS از مشاهدات کُدگذاری شده (coded observations) استفاده میکند.
بیایید به شکل ۱۳ نگاه کنیم، که سیگنالهای ماهواره و گیرنده را نشان میدهد که کمی خارج از فاز هستند. اما اگر آنها را به صورت منطقی مقایسه کنید، یکسان هستند. وقتی سیگنال ماهواره یک است، سیگنال گیرنده هم یک است. وقتی سیگنال ماهواره صفر است، سیگنال گیرنده هم صفر است. توجه کنید که سیگنال ماهواره کمی جلوتر از سیگنال گیرنده است. میتوانید سیگنال ماهواره را تقریباً به اندازه نیم چرخه به جلو شیفت دهید، و سیگنالها همچنان به صورت منطقی منطبق خواهند بود.

شکل ۱۳. همگامسازی منطقی سیگنالهای ماهواره و گیرنده.
در این روش، به دلیل همتراز نبودن کامل، روش دقت را تا سطح دسیمتر (۰.۱-۰.۵ متر) بهبود میبخشد.
یک گزینه بهبود یافته، سینماتیک بلادرنگ (RTK – Real-Time Kinematic) است. RTK یک نوع خاص از DGPS است. RTK از اصلی مشابه DGPS استفاده میکند اما از مشاهدات فاز (phase observations) استفاده میکند [۱۸]. بیایید به شکل ۱۴ نگاه کنیم، که ساختار سیگنال را نشان میدهد. سیگنال GNSS از یک حامل فرکانس رادیویی (radio frequency carrier)، یک کد باینری (binary code) منحصر به فرد با نویز شبهتصادفی (PRN – pseudorandom noise) و یک پیام ناوبری باینری (binary navigation message) تشکیل شده است.

شکل ۱۴. ساختار سیگنال.
همانطور که مشاهده میشود، حامل (carrier) فرکانس بسیار بالاتری نسبت به PRN دارد؛ به عنوان مثال، برای GPS L1، فرکانس ۱۵۷۵.۴۲ مگاهرتز است. طبق فرمول طول موج (۶)، طول موج ۱۹ سانتیمتر خواهد بود.

کد شبهتصادفی نرخ بیتی (bit rate) حدود ۱ مگاهرتز دارد، اما فرکانس حامل آن نرخ سیکلی (cyclic rate) بیش از گیگاهرتز دارد. بنابراین، سیگنال حامل میتواند یک مرجع بسیار دقیقتر از کد شبهتصادفی باشد. اندازهگیری فاز معمولاً بر حسب سیکل (cycles) بیان میشود و فاصله را میتوان بسیار دقیقتر از اندازهگیریهای کد محاسبه کرد.
RTK شناور (Float RTK) به این معنی است که ابهامات فاز (phase ambiguities) (اعداد صحیحی که تعداد طول موجها بین ماهواره و گیرنده را نشان میدهند) هنوز به طور دقیق تعیین نشدهاند. در عوض، این مقادیر به صورت اعداد کسری (غیر صحیح) باقی میمانند. دقت در این حالت معمولاً چند ده سانتیمتر است. RTK شناور به عنوان یک راهحل میانی استفاده میشود زمانی که الگوریتم نمیتواند ابهامات را به وضوح تعیین کند، اما کسب مختصات با دقت کافی برای اکثر وظایف از قبل امکانپذیر است.
RTK صحیح (Integer RTK) به این معنی است که ابهامات فاز با موفقیت حل شدهاند و مقادیر به صورت اعداد صحیح تعریف میشوند. این به شما امکان میدهد تا فاصله دقیق گیرنده تا ماهوارهها را با دقت بالا تعیین کنید. در برخی موارد، دقت در RTK صحیح به چندین سانتیمتر و حتی میلیمتر میرسد. این حالت دقیقتر و قابلاعتمادتر از RTK شناور است اما برای حل ابهامات به سیگنال با کیفیت بالا و زمان کافی نیاز دارد. در این راستا، از رویکرد “فاز حامل (Carrier-phase)” استفاده میشود که ماهیت آن به شرح زیر است: ابتدا یک راهحل تقریبی با استفاده از مشاهدات کد جستجو میشود، و سپس راهحل با استفاده از مشاهدات فاز اصلاح میشود. این را میتوان با تنظیمات درشت و دقیق مقایسه کرد.
RTK همچنین از فرکانسهای اضافی L1 و L2 (شامل L5) استفاده میکند. استفاده از فرکانسهای اضافی دقت را افزایش میدهد و امکان همبستگی بهتر خطاها را فراهم میکند. این روش دقت موقعیتیابی تا ۱ سانتیمتر را ارائه میدهد.
استفاده از اندازهگیریهای کد در DGPS و اندازهگیریهای فاز در RTK به روش مربوط میشود، نه به نوع خاصی از گیرنده. گیرندهها میتوانند عمومی باشند و هر دو نوع اندازهگیری را پشتیبانی کنند، اما انتخاب روش به اهداف و الزامات دقت بستگی دارد. مزیت DGPS این است که تنظیم آن سریعتر و آسانتر از RTK است. با این حال، برای کامپیوترهای قدرتمند مدرن، سرعت پردازش دادههای RTK هیچ مشکلی ایجاد نمیکند.
موقعیتیابی دقیق نقطهای (PPP – Precise Point Positioning) یک روش موقعیتیابی با دقت بالا با استفاده از سیستمهای ماهوارهای ناوبری جهانی (GNSS) است که امکان تعیین مختصات گیرنده با دقت سانتیمتری را بدون نیاز به ایستگاه پایه محلی، مانند RTK، فراهم میکند [۱۹]. در عوض، PPP از دادههای دقیق در مورد مدارهای ماهوارهای و تصحیحات سیگنالهای آنها که توسط سرویسهای جهانی ارائه میشوند، استفاده میکند.
برای محاسبه مختصات دقیق در PPP، گیرنده تنها از دادههای ماهوارهها استفاده نمیکند، بلکه از تصحیحات دقیق نیز بهره میبرد، که شامل موارد زیر است:
- مدارهای دقیق ماهوارهای (Precise Ephemerides): اطلاعاتی در مورد موقعیت ماهوارهها که توسط مراکز جهانی (مانند IGS – International GNSS Service) بهروزرسانی و ارائه میشوند.
- تصحیحات ساعت ماهوارهها: یعنی دادههای مربوط به افست علائم زمانی، که امکان جبران خطاها در اندازهگیری زمان در ماهوارهها را فراهم میکند.
- تصحیحات یونوسفری و تروپوسفری.
PPP از یک روش اندازهگیری فاز مشابه RTK استفاده میکند که امکان دقت بالا را فراهم میسازد. با این حال، برخلاف RTK، PPP برای انتقال تصحیحات تفاضلی از ایستگاه پایه محلی استفاده نمیکند؛ بلکه بر دادههای جهانی تکیه دارد. این دادهها را میتوان از ماهوارههای SBAS (سیستمهای تقویت مبتنی بر ماهواره) یا از طریق اتصال به اینترنت (NTRIP، اینترنت همراه) و همچنین از طریق ماهوارههای اختصاصی انتقال داده (مانلاً Starlink، Iridium) به دست آورد.
در برخی موارد، گیرندهها میتوانند دادههای مداری و تصحیحات دقیق را از قبل از طریق اینترنت از یک پایگاه داده دانلود کرده و سپس از آنها در فرایند موقعیتیابی استفاده کنند. این میتواند برای پردازش پس از دریافت داده (post-processing) مفید باشد، زمانی که دقت در زمان واقعی مورد نیاز نیست. به عنوان مثال، IGS و سایر سرویسها چنین دادههایی را ارائه میدهند. گیرندههای GNSS را میتوان به سرویسهایی که دادههای جهانی را از طریق شبکه ایستگاههای پایه زمینی (Trimble RTX، OmniSTAR و غیره) ارائه میدهند، متصل کرد.
این رویکرد در مناطق دورافتاده یا صعبالعبور که استقرار ایستگاه پایه غیرممکن یا دشوار است، بسیار مفید است. PPP میتواند به دقت سانتیمتری یا حتی میلیمتری دست یابد، اما به زمان راهاندازی خاصی (معمولاً ۲۰ دقیقه تا یک ساعت) نیاز دارد که در طی آن گیرنده دادهها را جمعآوری کرده و ابهامات فاز را حل میکند. در برخی موارد، از تصحیحات PPP بلادرنگ (RT-PPP) استفاده میشود که زمان راهاندازی را کاهش داده و مختصات را سریعتر به دست میآورد.
سیستم تقویت مبتنی بر ماهواره (SBAS – Satellite-Based Augmentation System) یک سیستم مبتنی بر ماهواره است که تصحیحات و دادههای اضافی را برای بهبود صحت، یکپارچگی و در دسترس بودن سیستمهای ماهوارهای ناوبری جهانی ارائه میدهد (شکل ۱۵) [۲۰]. SBAS از شبکهای از ماهوارههای زمینثابت (geostationary satellites) و ایستگاههای زمینی برای انتقال این دادهها به کاربران در زمان واقعی استفاده میکند. SBAS تصحیحاتی را ارائه میدهد که بر اساس دادههای جمعآوریشده از شبکه ایستگاههای زمینی پخش میشوند. این تصحیحات خطاها را به دلیل موقعیت ماهوارهها و شرایط انتشار سیگنال در نظر میگیرند و جبران میکنند. SBAS همچنین نظارت بر یکپارچگی سیگنال GNSS را فراهم میکند، که به ویژه برای کاربردهای حساس و حیاتی مانند هوانوردی مهم است. این سیستم به طور مداوم سیگنالهای ماهوارهای را نظارت میکند، و در صورت شناسایی هرگونه مشکل یا خطا، SBAS بلافاصله یک هشدار به کاربران ارسال میکند.
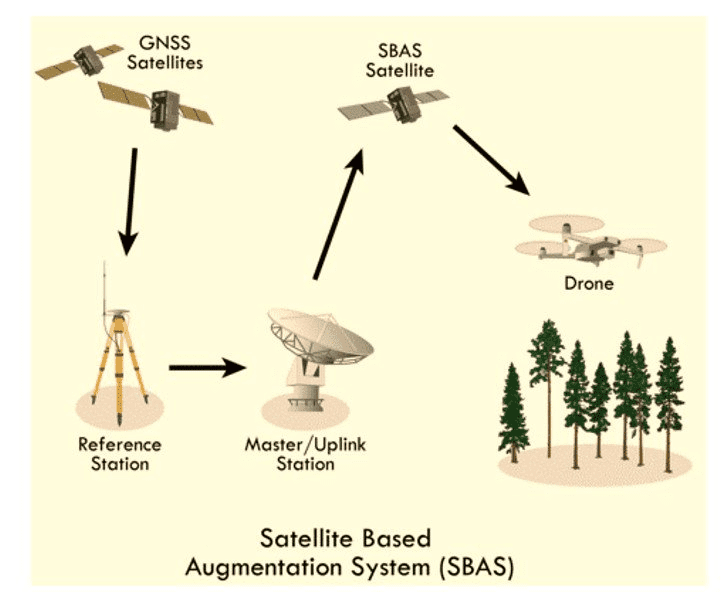
شکل۱۵.SBSA
این امر امکان ارزیابی بلادرنگ میزان صحت و قابلیت اطمینان مختصات دریافتی و استفاده از آنها را در محیطهای حساس ایمنی فراهم میکند. ماهوارههای SBAS زمینثابت (Geostationary SBAS satellites) دادهها را در همان محدوده فرکانسی GNSS (مثلاً باند L) منتقل میکنند، بنابراین گیرندهها میتوانند آنها را همراه با سیگنالهای GPS یا سایر سیگنالها دریافت کنند.
چندین سیستم SBAS منطقهای وجود دارد که هر کدام مناطق خاصی را پوشش میدهند:
- WAAS (Wide Area Augmentation System) — در آمریکای شمالی. توسط سازمان هوانوردی فدرال ایالات متحده (FAA) مدیریت میشود [۲۰].
- EGNOS (European Geostationary Navigation Overlay Service) — در اروپا. توسط آژانس سیستم ماهوارهای ناوبری جهانی اروپا (GSA) مدیریت میشود [۲۰].
- MSAS (Multi-functional Satellite Augmentation System) — در ژاپن. توسط آژانس فناوری ناوبری هوایی و دریایی ژاپن مدیریت میشود [۲۰].
- GAGAN (GPS Aided GEO Augmented Navigation) — در هند. توسط سازمان تحقیقات فضایی هند (ISRO) مدیریت میشود [۲۰].
- SDCM (System of Differential Correction and Monitoring) – در روسیه [۲۰].
SBAS به طور گسترده در هوانوردی برای بهبود دقت و قابلیت اطمینان ناوبری در هنگام برخاست، فرود و پرواز استفاده میشود. SBAS همچنین میتواند در کشتیرانی، ناوبری زمینی و ژئودزی، جایی که دقت بالا مورد نیاز است اما نیازی به دقت سانتیمتری RTK وجود ندارد، استفاده شود.
یکپارچگی با سیستمهای ناوبری اینرسیایی (INS – Inertial Navigation Systems). در محیطهای چالشبرانگیز که سیگنالهای GNSS ممکن است مسدود یا تحریف شوند (مانند تونلها یا بین ساختمانهای بلند)، GNSS اغلب با سیستمهای ناوبری اینرسیایی (INS) ترکیب میشود، که از شتابسنجها و ژیروسکوپها برای تعیین حرکت استفاده میکنند [۱۳]. این امر به کاربران امکان میدهد حتی در صورت عدم دسترسی موقت به سیگنالهای GNSS، موقعیت خود را تعیین کنند.
گیرندههای چندفرکانسی (Multi-frequency receivers). گیرندههای مدرن GNSS میتوانند سیگنالها را از چندین مجموعه ماهوارهای در چندین فرکانس دریافت کنند [۲۱]. استفاده از فرکانسهای مختلف به جبران اعوجاج سیگنال در یونوسفر کمک کرده و خطاها را کاهش میدهد. گیرندههای چندفرکانسی به دلیل دید همزمان ماهوارههای بیشتر، دقت بالاتر، مقاومت در برابر تداخل و پایداری بهتری را فراهم میکنند. آنها همچنین ابهام صحیح (integer ambiguity) را با اثربخشی بیشتری حل میکنند و امکان دستیابی به دقت سانتیمتری را سریعتر از تجهیزات تکفرکانسی فراهم میسازند.
آنتنهای مقاوم در برابر تداخل (Interference-resistant antennas). برای مقابله با اثرات پارازیت (jamming) و اخلالگری (spoofing)، آنتنهای GNSS ویژهای با آنتن با الگوی دریافت کنترلشده (CRPA – Controlled Reception Pattern Antenna) توسعه یافتهاند [۲۲]. CRPA از مجموعهای از عناصر گیرنده (معمولاً چندین آنتن) تشکیل شده است که در یک پیکربندی خاص (مثلاً دایرهای) چیده شدهاند. تفاوت اصلی بین CRPA و یک آنتن معمولی این است که الگوی جهتدار آن میتواند به صورت پویا تغییر کرده و با شرایط محیطی با استفاده از فازبندی (phasing) و پردازش سیگنال سازگار شود. هر عنصر CRPA یک سیگنال GNSS را دریافت میکند. این عناصر در فاصله ثابتی از یکدیگر قرار دارند که به آنتن اجازه میدهد سیگنالها را از جهات مختلف دریافت کند. سیستم کنترل، فازها و دامنههای سیگنالهای رسیده به هر عنصر آنتن را تحلیل میکند. و برای تغییر الگوی جهتدار بلادرنگ، شیفتهای فاز و بهره (gains) را بر آنها اعمال میکند. فازبندی سیگنالها از هر عنصر آنتن، یک الگوی جهتدار به اصطلاح ایجاد میکند که بر منابع سیگنالهای صحیح (مانند ماهوارههای GNSS) متمرکز میشود و همزمان مناطق صفر (null zones) را در جهت منابع تداخل ایجاد میکند. این فرایند هدایت صفر (null-steering) (که به آن صفرسازی اجباری (zero-forcing) نیز گفته میشود) نامیده میشود و به CRPA اجازه میدهد تا سیگنالهای ورودی از جهات ناخواسته را سرکوب یا به حداقل برساند. CRPA همچنین با سرکوب جهتدار سیگنالها از زوایای غیرمعمول، به کاهش اعوجاج چندمسیره (multipath distortion) ناشی از سیگنالهای بازتابی (multipath) کمک میکند.